ProjectsContact Me
Crescendo
My second major game development project was created for a 2026 game jam hosted between UVic and UBC. Over the course of several very busy days, I partnered with David Mooers to design and build a tower defense game centered around the theme of Evolution. Our core idea was to have the gameplay and music evolve together. As players place towers, the soundtrack gradually builds in complexity and intensity. This created a dynamic feedback loop between strategy and sound, making progression feel both mechanical and musical. You can download and try the game here.
Between the two of us, we invested over 100 hours into the prototype. Our work spanned gameplay programming, asset creation, sound design, and the development of a fully event-driven adaptive music system using FMOD integrated with Unity. Implementing real-time music layering based on player actions was one of the most technically difficult aspects of the project, but the system is very easily extensible. Balancing the game was difficult, and between this and working on the music for only a couple of hours at the end of the jam, there is a lot of polish that can still be added.
This project was an incredible creative and technical challenge, and I am strongly considering continuing its development after graduation as another project for fun. The foundation is solid, and there is significant potential to expand both the strategic depth and the adaptive audio system further.
Motion Estimation
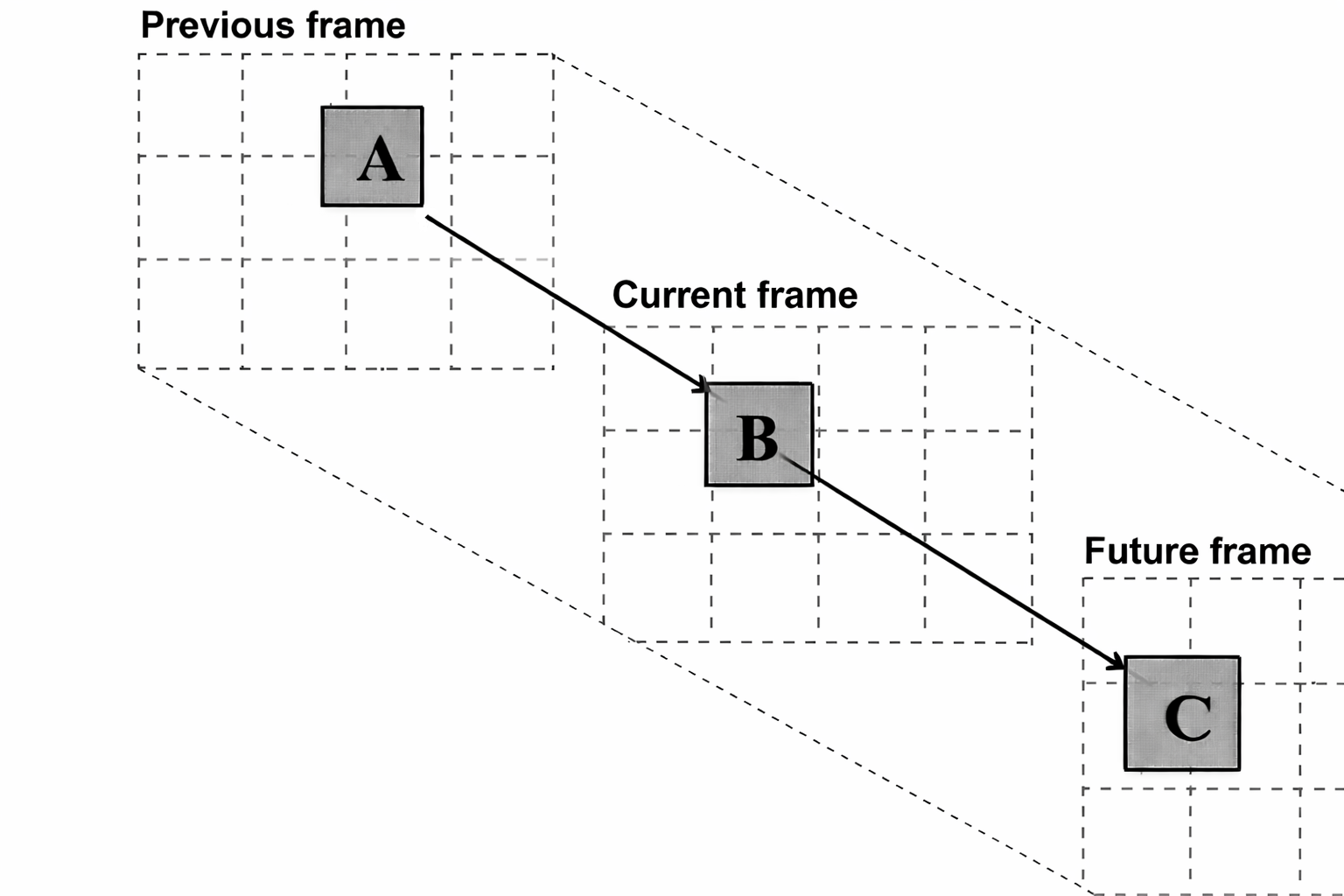
This project involved using various optimization techniques to compute the Sum of Absolute Differences for motion estimation on a Raspberry Pi. Seven implementations incorporating different types of optimizations were compared, including scalar and ARM NEON vectorized approaches with Matlab verification. Google's Benchmark library was used to evaluate performance. Testing was performed on 320x240 image frames with varying motion characteristics, using OpenCV for matrix operations and Catch2 for correctness validation.
This project gave me exposure to C++ build tools, package managers, test frameworks, and optimization techniques. Notably, NEON vectorization achieved a 3.4x speedup over the naive implementation while also reducing the number of matrix accesses significantly. Vector operations provided the largest speedup individually, but combining several techniques was the most effective. Additionally, analysis of the generated assembly instructions demonstrated that using ternary operations to avoid branching provided significant speedup.
Counterintuitively, aggressive optimizations including full loop unrolling degraded performance by 26% with NEON vectorization due to trading loop iterations for additional data retrieval calls, which were already the computational bottleneck. Motion vector calculation optimizations provided up to 20× speedup for images with large static regions through zero difference detection and no-motion checks.
Oceanographic Data Discovery
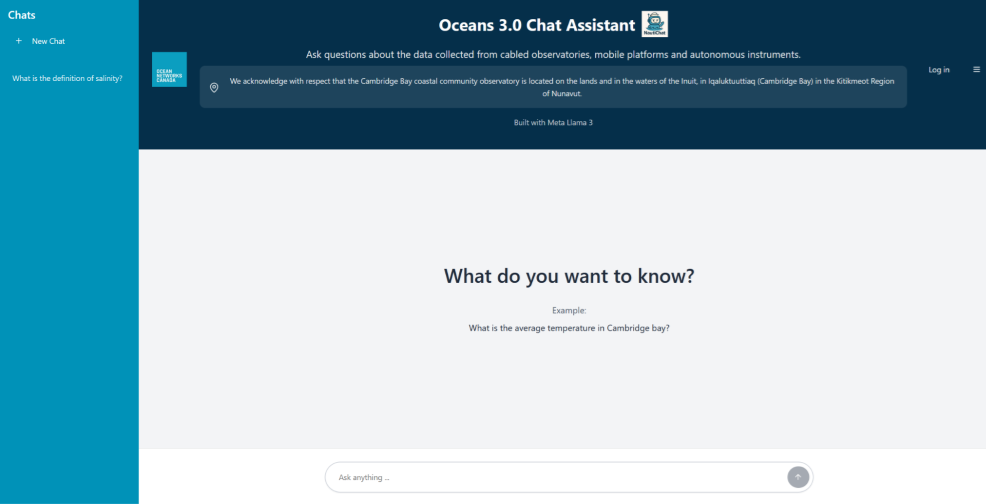
My capstone project involved creating an AI-based chatbot for Ocean Networks Canada that enables users to query the Oceans 3.0 data archive using natural language. The goal of the project was to make complex oceanographic data more accessible by allowing users to interact with ONC’s datasets conversationally rather than through traditional query interfaces.
My work focused on natural language processing techniques, including Retrieval-Augmented Generation and semantic search, to accurately interpret user intent and produce context-aware responses. The chatbot determined whether a query required dynamic, real-time data or static reference information, and then leveraged either a vector database or direct API queries to retrieve relevant data before generating a response.
The resulting system is an AI-driven web application designed with an emphasis on usability, robustness, and explainability to ensure reliable behavior across a wide range of query types. By lowering the barrier to data exploration, the system supports both scientific analysis and general public curiosity, demonstrating how AI can broaden access to complex scientific datasets.
Game Development
I am current working on a 2D/3D hybrid JRPG in Unreal Engine 5. I expect this to be a long term project. I have what I would consider a MVP for the combat system, but there is a lot of work left for any sort of release or play testing.
I plan to work on the artwork, music, VFX, and the programming on my own. I have created a variety of soundtracks and artwork already and am enjoying ownership over my own project.
More details will be added as progress is made on this project.
Fractured Flight
Being a lifelong video game fan, game development has always been an interest of mine. The main thing stopping me from trying was the busyness of being a student, but recently I have made time to give it a try! The game is now featured on my Github and on my website here.
The game I made is a basic platformer where you play as a dimorphodon, a small pterosaur known for its big head compared to its tiny body because I love dinosaurs. To begin the game, the dimorphodon hurts itself falling out of its nest in the jungle, slowly regaining its movement abilities as it looks for a new safe place to live with its family. This gives me lots of room to work with adding new movement options as the player completes various levels! I was also very fortunate to have the help of very talented artists. I used many free game assets found online, but Vanessa Ruiz Capitan created the main character and its animations, for which I am very grateful. Upcoming features include enemies with simple pathfinding AI using A*, boss fights, and the second world where new movement options will become available.
I'm very excited to continue working on this project, as the completion of new game mechanics, art, and world design in Unity have been very rewarding and a lot of fun. Being experienced with C# from past work experience helped me transition smoothly to scripting in Unity. I have other game ideas in mind that I would like to work on over time, though some (like RPGs) feel like long-term investments.
EDF Scheduler and Traffic Light Simulation
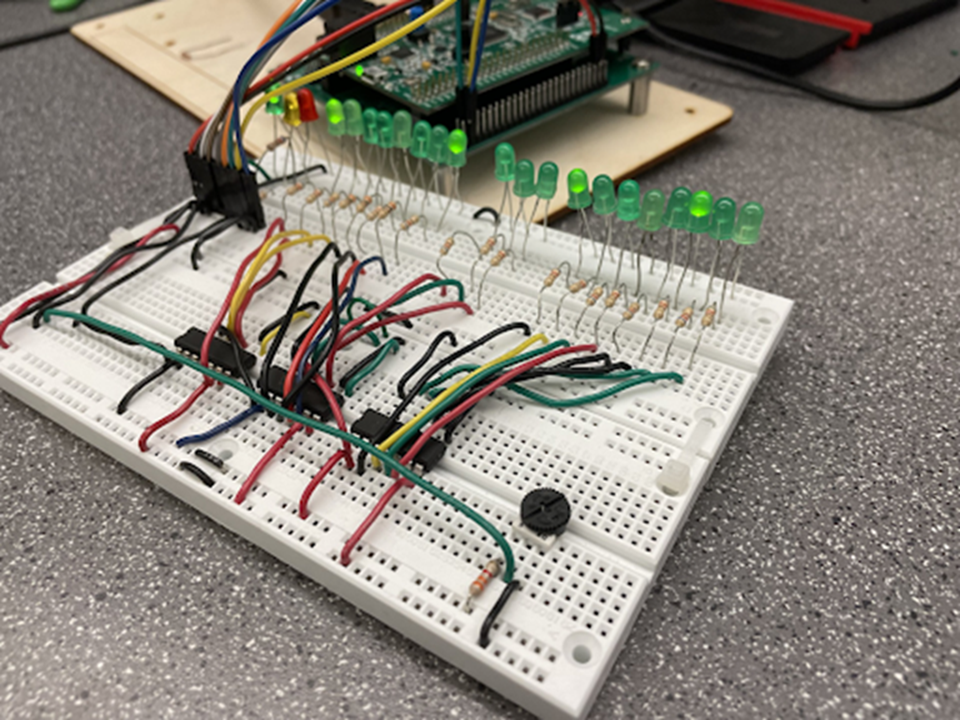
These two projects were undertaken as part of an upper-year design course focused on real-time operating systems. The course provided practical applications of concepts such as adhering to real-time constraints, meeting hard deadlines, and using FreeRTOS on an embedded platform (STM32F4 microcontroller). The projects focused on building functional simulations for a traffic light system, and implementing an Earliest Deadline First (EDF) scheduler in FreeRTOS.
The first project involved creating a real-time Traffic Light System. The system simulated a one-way road with a traffic light, using FreeRTOS tasks and queues for real-time operations and inter-task communication. The system used a potentiometer to adjust traffic flow, LEDs to represent cars and traffic lights, and middleware I developed to abstract hardware interactions. Key design elements included FreeRTOS tasks for traffic flow adjustment, car generation, traffic light control, and car movement, along with queues for inter-task communication.
The second project involved the implementation of a Deadline-Driven Scheduler on an STM32F4 microcontroller using FreeRTOS. The scheduler was designed to manage both periodic and aperiodic tasks using an Earliest Deadline First prioritization to maximize processor utilization. Since FreeRTOS doesn't natively support this type of scheduling, a custom scheduler was built using FreeRTOS tasks, queues, and software timers. A monitor task was also included to report the number of active, completed, and overdue tasks. The system's overhead was optimized to remain under one millisecond for all operations, ensuring the scheduler did not introduce delays that would prevent the operating system from meeting task deadlines.
Weld Access Verification Tool
This was a project I completed through my most recent co-op term. I don't generally include work projects but developing prototypes was largely self guided and completed with my fellow co-op student as a pair so I wanted to showcase it here.
The AGT Robotics BeamMaster WAV (Weld Access Verification) Tool is an innovative Tekla plugin that revolutionizes weld planning in steel fabrication. By automatically integrating true-to-scale weld arm models into your Tekla environment, this powerful tool allows designers and engineers to visualize real-world welding scenarios, instantly identify potential access issues, and optimize projects for AGT BeamMaster robotic welding systems.
I worked on this application during my time at Exact Detailing with one other co-op student. We found ourselves incredibly dedicated to the completion of this project and were able to complete and publish it over the course of our 4-month internships. We picked up the project from where some previous students had left off but wound up reworking most of the application due to changing business goals and project requirements. Working closely with AGT Robotics, we were able to publish this to an online catalog, Tekla Warehouse, where it can be downloaded for use by anybody with a Tekla license.
VirtualER
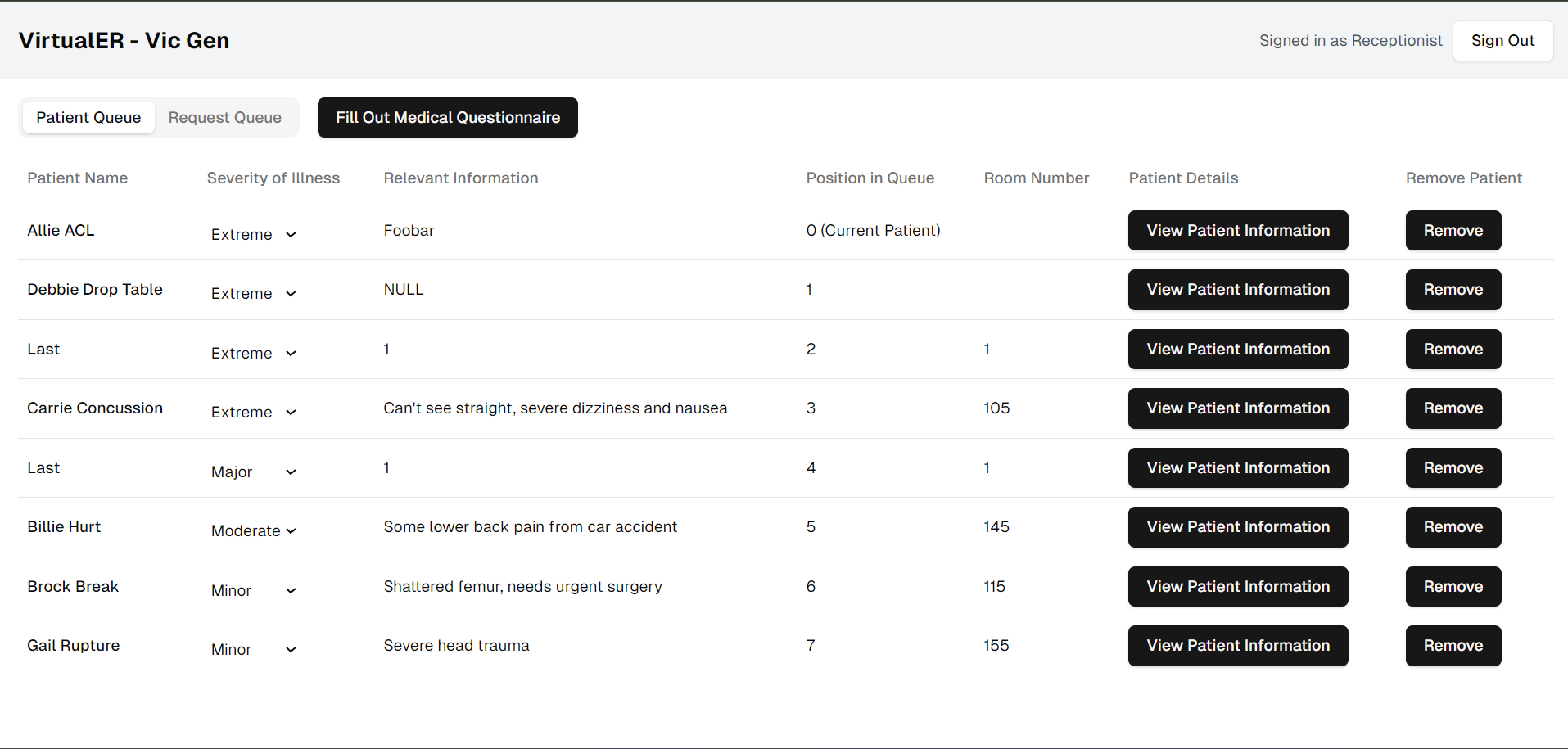
This web-based application allows patients to easily find wait times of nearby emergency rooms to meet their medical needs. The project consisted of both a full implementation of the product as well as a detailed requirements phase, diagrams, and project planning. The project was for a Software Architecture class, but our design, tools used, approach, and system was all original work from our 4 person team.
I would have liked to spend more time consulting with healthcare workers in order to more closely meet the needs of the actual healthcare field rather than the project requirements that were outlined. I am confident that we met the requirements for the scope of our project, but I feel like the application would need some serious overhauls to be used in any sort of workplace.
One thing that I believe is a bit of an oversight with this project is that many workplaces simply don't have the staff to support an app like this. It requires too much help from ER staff to run properly and in order to be automated there are serious ethical and legal considerations involved.
Automated Feedback for Engineering
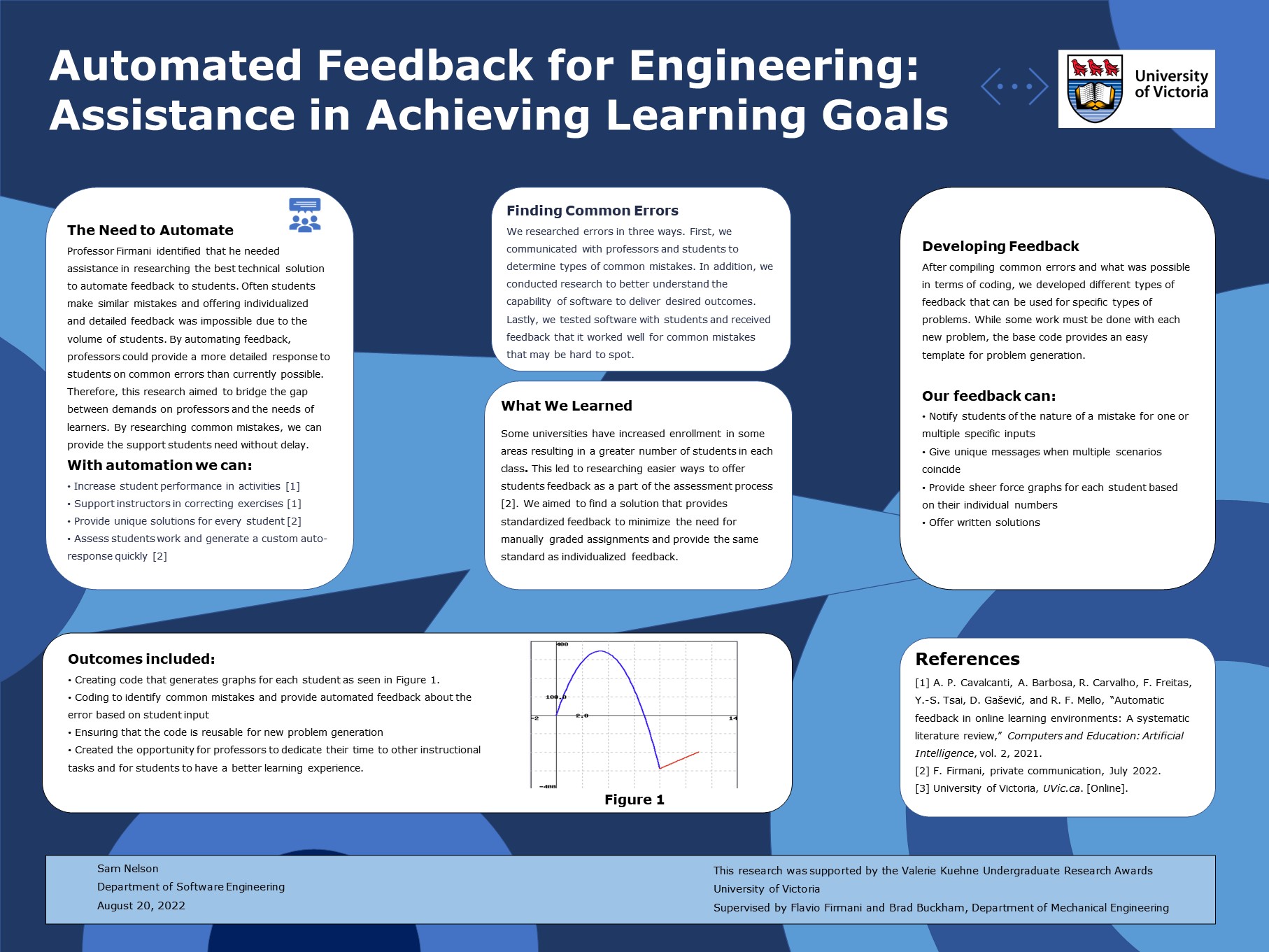
In the Summer of 2022 an advisor within the faculty of engineering reached out to me suggesting that I apply for a research grant based on my academic standing. Together with Dr. Flavio Firmani, I applied for funding towards a joint research project in order to provide students with automated feedback for homework problems and improve learning outcomes. Dr. Firmani identified that students frequently make similar mistakes, but due to the volume of students, individualized feedback was impossible.
This led to our research into both diagnosing frequent mistakes made by students and into the kinds of tools we had available to improve the learning outcomes based on patterns we found. After gaining some insight into frequent problems made by students, we looked into the tools provided within WeBWork, the online homework system used for the statics class we were investigating.
The main outcomes of our research included generating graphs for students automatically based on their inputs to provide a visual aid and automated feedback messages for various pre-defined inputs. Given more time, I would've liked to collect data based on student submissions in order to better categorize common mistakes.
Personal Website
After several years of toying with the idea of coding a website myself amongst a busy school schedule I made time to practice my development skills with web-based applications. The result is this portfolio of my education, work, skills, and projects that I am especially passionate about.
Following the development of VirtualER, I wanted to create a Next.js application to function as a personal website while I was still learning these new technologies. I am very happy with how it turned out and welcome any feedback! Click on my icon or visit the contact me page to reach out and let me know what you think!
Business Analytics Improvement Plan
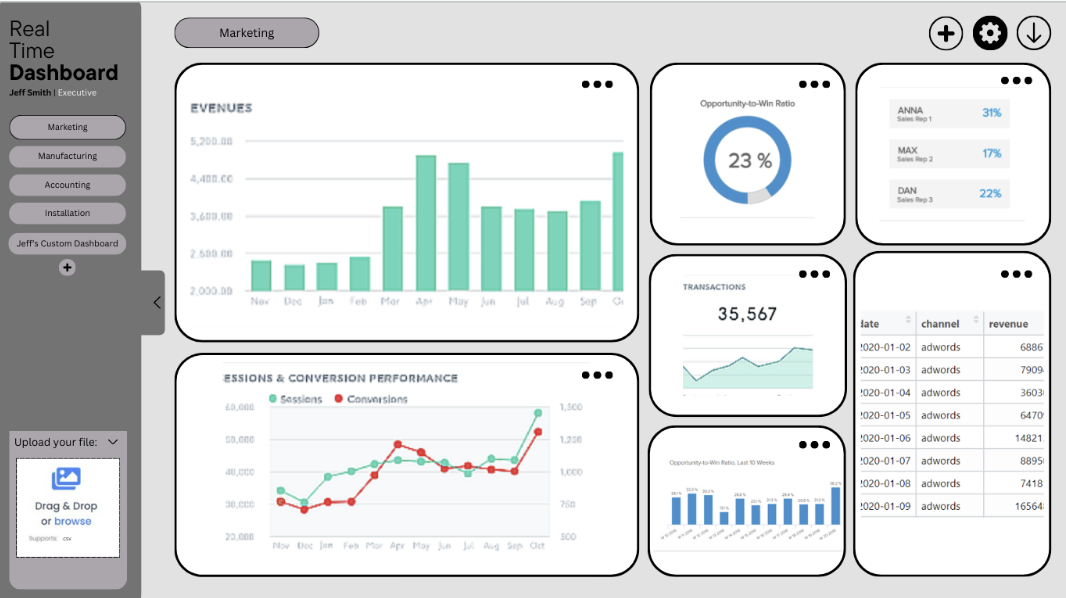
This project consisted of eliciting requirements from a company for software development improvements they desired and developing a prototype based on the requirements. We worked with a company called Real Time Networks to elicit requirements and create a requirements document for the software they wanted, as well as prototyping a potential solution.
Their company contained numerous departments: marketing, manufacturing, accounting, and installation, and each department managed its own data footprint independently. The software solution they wanted was a centralized data analytics dashboard to better concentrate their data footprint. This would allow management to be better informed of the work and ongoings of various departments from a single place.
We developed an entire prototype for a web-based platform combining their data analytics and platforms as well as suggesting how to implement it with various APIs. You can take a look at the complete requirements document as well as some of the prototype's features at the bottom of it here.
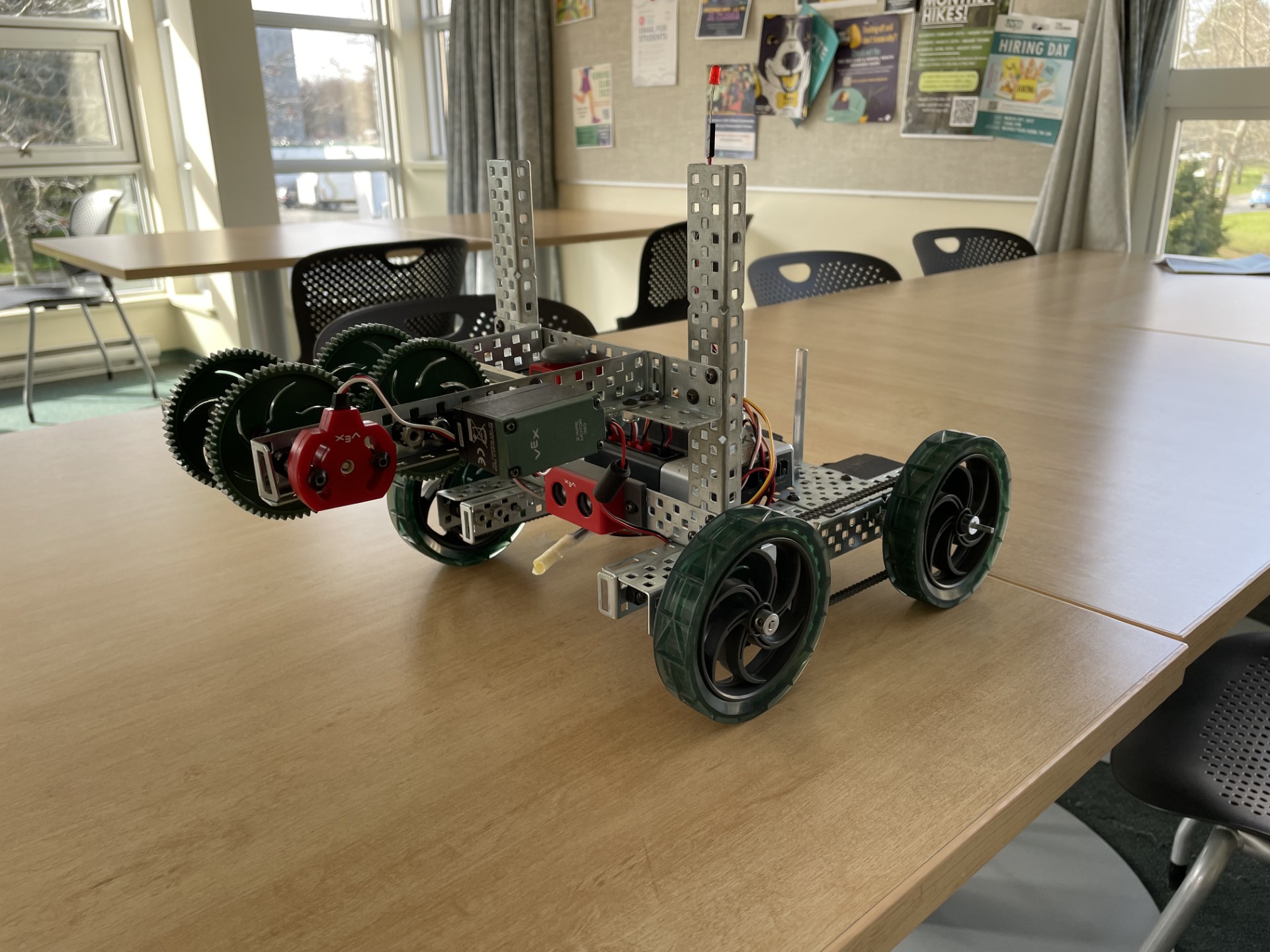
Autonmous IR Detection Robot
This project involved building a robot as a prototype for an autonomous underwater vehicle able to position a debris cleaning device on top of underwater cameras and sensors. The task required of this robot was to locate a randomly placed infrared emitter in an enclosed space, approach it, and drop a ping-pong ball on top of it without it falling off.
As can be seen in the image of our robot design, we have an arm that extends in front of the robot with gears that twist open to drop the ball on the target. I assisted with the electrical work, design, and overall construction of the robot, but my biggest contribution was designing a finite state machine for our workflow and implementing that in code. Our robot was one of few able to pass all tests consistently without hitting any walls or the target.